2アンテナGNSS受信機Unicore Communications UM982
はじめに
また、新しい測位衛星(GNSS: global navigation satellite system)受信機を試したくなりました。以前に、bynavの受信モジュールC1-FSと、Unicore Communications, Inc.(和芯星通、以下Unicoreと略します)の受信モジュールUB4B0の、どちらかを備える受信機を購入しようと迷い、結局bynav受信機を選択しました。しかし、いつかはUnicore受信機を使ってみたいと思っていました。
今回、2022年8月に発売された、2アンテナ入力を備えるUnicore UM982受信機を導入しました。2アンテナにて同時測位を行い、受信機内でそれらの座標差を計算することにより、静止時であってもその進行方向(ヘディング)を得られることが期待できます。この受信機は、GPS Worldにも、Unicore releases dual-antenna RTK module, the UM982として紹介されています。
UM982の仕様
このUM982は、Unicoreの最新SoC(system on a chip、ソックと読みます)であるNebulas 4(UC9810)を採用し、GPS、GLONASS、Galileo、準天頂衛星みちびき(QZSS: quasi-zenith satellite system)、北斗(BeiDou)の電波を1408チャネル(!)同時に受信するそうです。これは、以前に検討したUB4B0よりも、2世代、進んだものです。メインアンテナは、
- GPS L1 C/A, L2P(Y), L2C, L5 (L2PYとL2Cは排他使用?)
- GLONASS L1, L2
- BDS B1I, B2I, B3I
- Galileo E1, E5a. E5b
- QZSS L1 C/A, L2C, L5
の信号受信が、また、サブアンテナは、
- GPS L1 C/A, L2C
- GLONASS L1, L2
- Galileo E1, E5b
- QZSS L1 C/A, L2C
- BDS B1I, B2I, B3I
の信号受信ができるとのことです。また、NMEA(National Marine Electronics Association, エヌメア)-0183形式の座標や方位角と、Unicore形式の生データとが、共に20 Hzにて出力できるとされています。モジュール運用温度は、セ氏-40度から85度までであり、自動車等での利用にも適します。この価格で、本当にこれらのすべてができたら、すごい受信機といえます。
しかし、説明書として公開されているのは、簡易なもの(UM982 Installation and operation user manual、Version R1.1 2022-09-09)のみですので、この受信機機能の利用に不安はありました。
このUM982のサポートソフトウェアとして、特に記述はありませんが、Windowsにて動作するuSTARが利用できそうですので、これを用いてUM982での衛星信号受信を試してみます。使用したuSTARのバージョンは、uSTAR_R3.0.0_win32_Build2100です。Unicore受信機の紹介に用いられるサポートソフトウェアのスクリーンショットには、uPrecisionと呼ばれる、別のソフトウェアものが掲載されていますが、UnicoreのホームページにこのuPrecisionを見つけられませんでした。
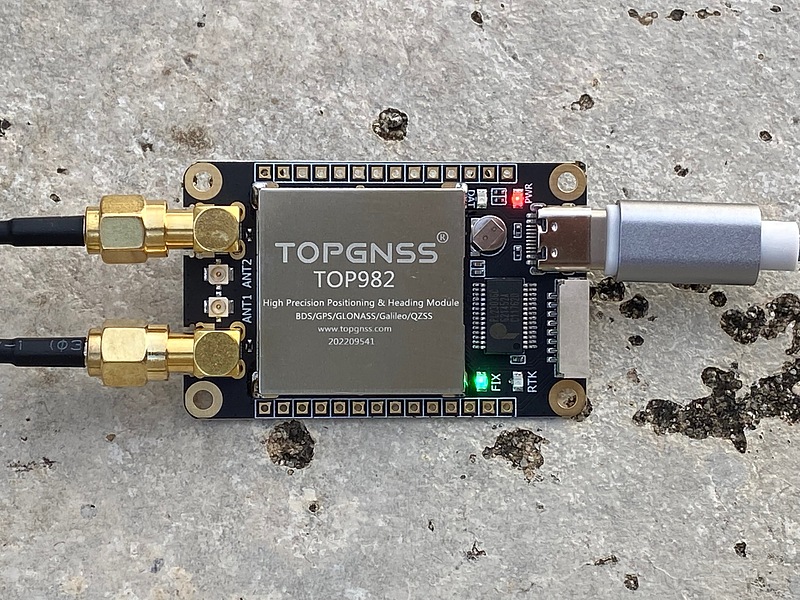
UM982を搭載したTOP982受信機
私が購入した受信機は、AliExpressのTOPGNSS StoreのTOP982で、UM982にアンテナ端子やシリアルインターフェースなどが付加されたものです。価格は650 USDで、日本円にて86,484円でした。
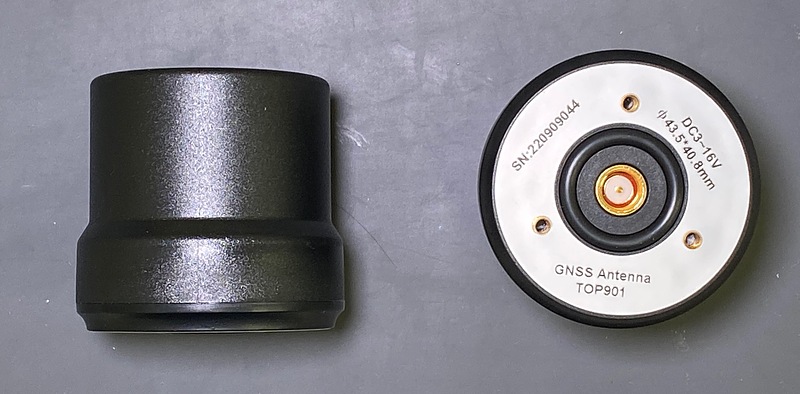
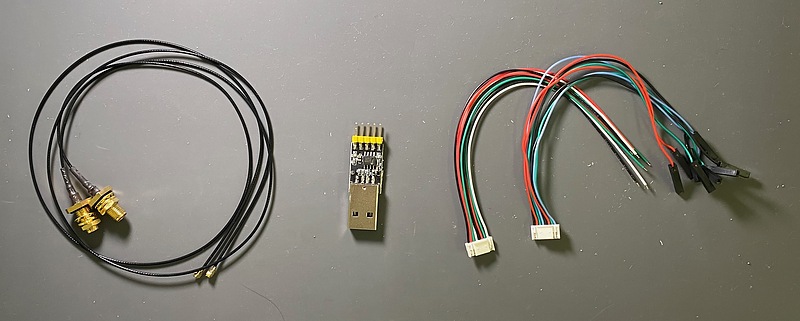
この受信機キットには、受信機本体だけでなく、L1/L2/L5周波数帯アンテナ(TOP901, SMAコネクタ)2本と、u.FL-SMA変換ケーブル2本が付属していました。購入して、すぐに実験できるようになっています。
さらに、基板取付用のSMAコネクタ2個も同梱され、基板上にはこれらの取り付け箇所も用意されていました。私はu.FLコネクタを好まないので、すぐに、このSMAコネクタを基板にハンダ付けしました。
また、このキットには、シリアルインターフェースケーブル2種類や、シリアル-USB変換ボードも添付されていました。今のところ、私はこれらのパーツ必要ありませんが、他の用途にも使えますので、付属していて嬉しいです。
実験
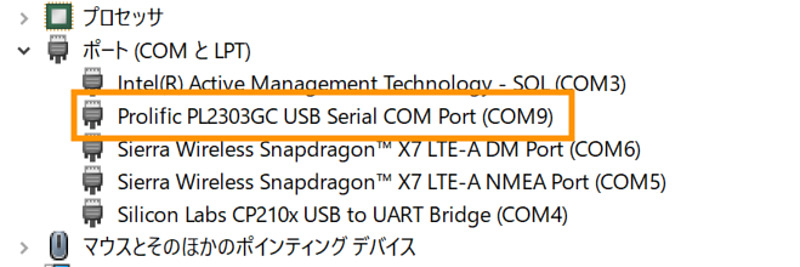
このTOP982受信機をUSB-CコネクタにてWindows PCに接続しました。特にドライバをインストールすることなく、PCはこの受信機をProlific PL2303 USB Serialとして認識しました。
次に、この受信機(下の写真中央)と、アンテナ2本を、ダンボールに固定しました。ANT(antenna)1はメインアンテナで、このアンテナ位置が座標基準です(写真右)。一方、ANT2はサブアンテナで、メインアンテナに対して進行方向前方に取り付けます(写真左)。
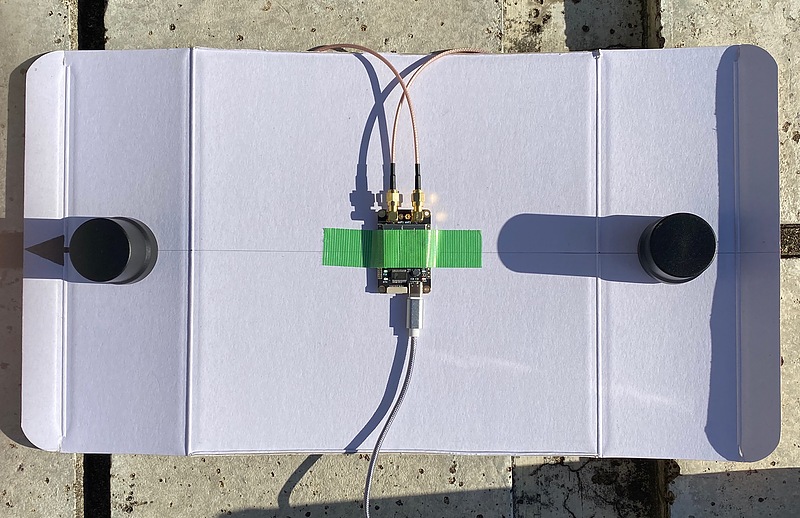
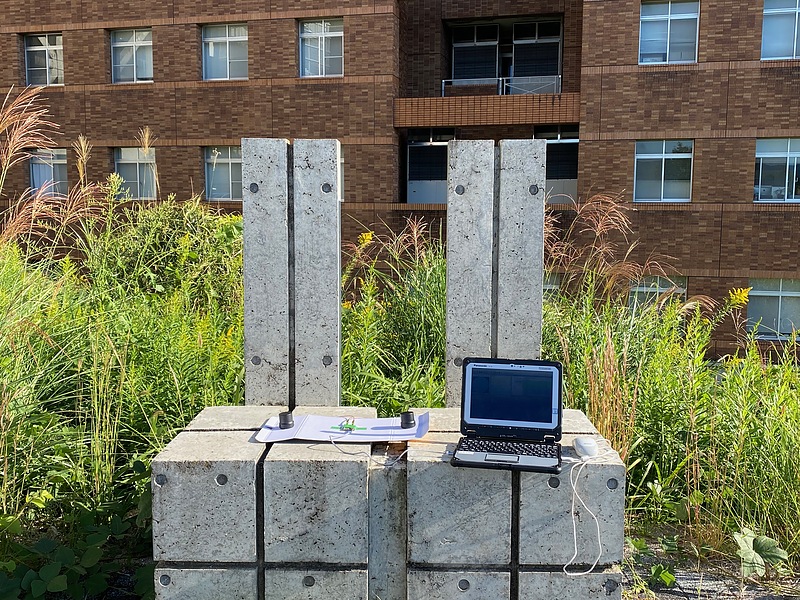
これを職場の見通しのある場所に設置して、衛星信号を受信しました。受信開始から10秒程度で、緑色のFIX表示が点灯し、座標や進行方向が特定できるようです。本来、2アンテナ受信機を使用するときには、これらの座標を指定する必要があります。この受信機では、特に、この2アンテナ間の位置関係を指定しなくても、衛星信号受信により、アンテナ座標の関係を推定するようです。
そして、上述のuSTARソフトウェアを起動しました。uSTAR画面の左上にある電話マークをクリックし、ボーレートとして115200 bpsを選択すると、このUM982受信機の動作を監視できます。NMEA viewや、Message ParseのNMEA欄には、1 Hzの更新レートにて、多くのデータが表示されました。しかし、衛星配置(satellite view)や、電波強度(CN0 view)には、何も表示されませんでした。これらに、一瞬だけ、何か表示されることがありますが、すぐに消えてしまいます。
NMEAメッセージを見ると、一つの衛星システムの衛星に関するメッセージ(例えばGPSならばGPGSV, GPS satellite status in view)が3セットありました。この受信機は、3周波数帯受信できるので、NMEAメッセージも3セット現れます。一方、他のUnicore受信機は2周波数帯のものなので、このソフトウェアは、2つのNMEAメッセージセットが来たら表示し、次のメッセージが来たら直ちに画面クリアするように動作すると推測しました。そのため、続けてこの3つ目のNMEAメッセージを受信したとき、画面がクリアされて、何も表示されないように見るのだと思います。座標については、GNRMC(GNSS simplest navigation data)メッセージ1セットに集約されますので、uSTARのMap viewにある座標欄に正しく読み込まれたようです。
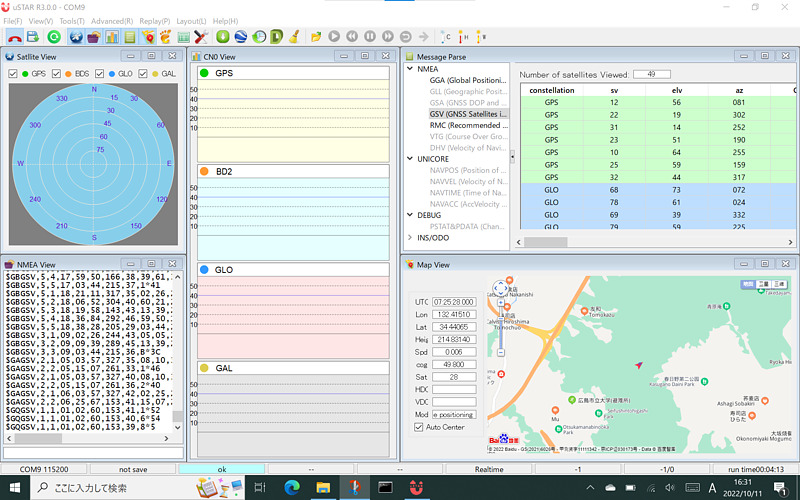
このuSTARサポートソフトウェアは、地図表示にBaiDu(百度)のサービスを利用しています。地図に表示された位置は、この測定場所とは異なっていましたが、座標値は正しいです。この地図データの座標が正しくないのかもしれません。
進行方向は、NMEAメッセージのGNHDT(GNSS heading)センテンスにありました。静止時において、GNHDTメッセージ値変動は0.2度程度とほとんど変化せず、回転させるとそれに追従した値を示すことから、その不確かさ(測定値のばらつき)は小さいといえます。精度(測定値の再現性)もその変動範囲にあるようです。
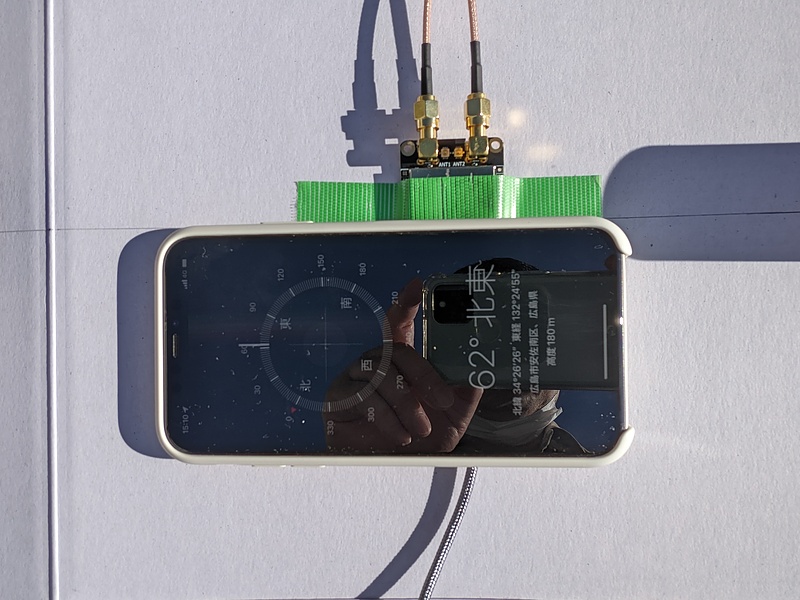
スマートフォンアプリで、方角を真北表示するように設定して、この進行方向を測定したところ、北から時計方向に62度を示しました。一方、そのときのGNHDTセンテンスの値は53度でした。この進行方向の正解や、両者に差のある理由は、わかりません。この測定場所の広島において、磁北の真北からの偏差(磁気偏角, magnetic variation)は、6.5度だけ西にあります。したがって、この差は、磁気偏角ではないようです。
$GNHDT,52.9354,T*27
一方、uSTAR上の地図矢印方向は、このGNHDTセンテンスの値を利用していないようで、静止時の地図表示上の矢印向きは正しくありませんでした。
次に、uSTARのView→MSG Config Viewにて、UM982の設定変更を試みました。表示窓には、PDTINFO(product info)、RESET(receiver reset)、CFGSAVE(save configuration)、CFGCLR(clear configuration)、CFGPRT(serial port configuration)、CFGNMEA(NMEA output configuration)、CFGMSG(message output configuration)、ANTSTAT(antenna detection status)、CFGSYS(GNSS system configuration)、CFGNAV(positioning configuration)、CFGINS(inertial navigation control)、CFGROTAT(antenna instration configuration)、CFGLARM(level arm configuration)、CFGODOFWD(odo configuration)の候補があります。しかし、これらのコマンドを送信しても、私のUM982受信機出力に変化はありませんでした。最大20 Hzの座標測定を期待していましたが、変更できなくて、残念です。
また、View→Message ParseにあるUNICOREメッセージは、NAVPOS(position)、NAVVEL(velocity)、NAVTIME(GNSS system time information)、NAVACC(accuracy)に関するもののみのようで、衛星システムの航法メッセージや、疑似距離は出力に関するものはありませんでした。
Unicoreホームページにて受信機の資料を探しましたが、受信機設定コマンドや付加的バイナリデータのものは見つけられませんでした。Unicoreの、UM982以外の受信機についても同様です。
また、GNSS Module using Unicorecomm boardsに、Unicore UB4B0のものと思われるコマンドが記載されていました。これらは、上述の設定変更コマンドとは異なるので、設定変更できることを期待したのですが、これらのコマンドを私のUB982に送信してみても、シリアルポート出力に変化はありませんでした。
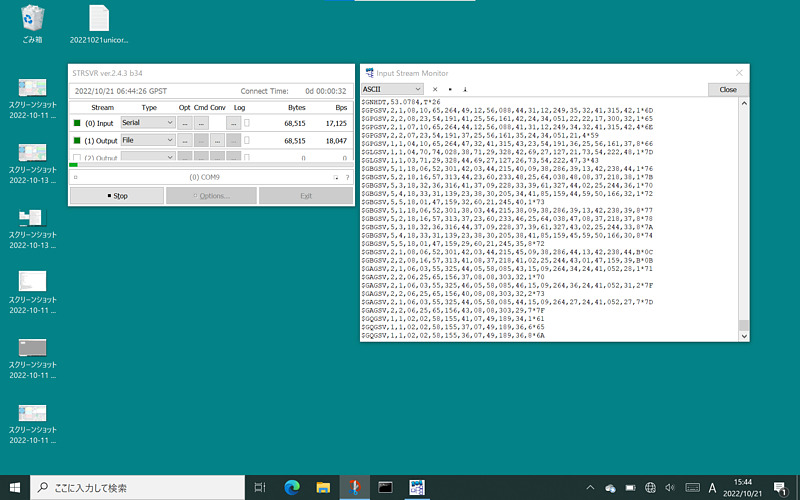
次に、RTKLIB ver.2.4.3b34のSTRSVRアプリケーションを用いて、シリアルポート内容を表示しながら、ファイルに保存してみました。受信機進行方向に追従して、GNHDTメッセージ値が変化することを確認できました。シリアルポート出力に、付加的バイナリデータを期待していたのですが、そのファイル内容にはNMEAメッセージしかありませんでした。また、STRSVRの双方向モードを利用して、この受信機にRTK(realtime kinematic)基準局のRTCM 3メッセージを注入してRTK測位を試みましたが、その出力に変化はありませんでした。
なお、天空を見通せない環境では、進行方向メッセージGNHDTはゼロを示しました。

私のUM982受信機は、2アンテナにて進行方向を推定でき、3周波数帯での高精度座標推定ができるようです。しかし、座標特定のための3周波数帯の利用方法の設定、観測した擬似距離情報の出力設定、また、衛星航法メッセージの出力設定に関する公開技術情報は見つけられませんでした。特に、受信機を使いこなすための設定に関する資料がありませんでした。そのため、実験していて、あまりワクワク感はありませんでした。この受信モジュールのI2CインターフェースやCAN(controller area network)インターフェースは、上述のUsers manualによると、今後のファームウェア更新で対応するそうです。UM982受信モジュールの設定コマンド、サポートソフトウェア、そして、新ファームウェアが公開されることを楽しみにしています。
まとめ
Unicore CommunicationsのUM982受信機を導入しました。特に追加設定することなく、静止時においても進行方向が推定でき、また、3周波数帯測定により正確な座標が推定できますので、実用性は高いようです。しかしながら、受信機設定に関する情報がほとんど公開されていなくて、既定値のままで利用することになります。現時点では、この受信機は研究者にとって楽しい受信機とはいえないかもしれません。
関連記事
- GNSS受信機UM982の制御コマンド 29th December 2022