Septentrio mosaic-go CLAS, a GNSS receiver
Introduction
I introduced Septentrio’s mosaic-go CLAS evaluation kit, a GNSS (global navigation satellite system) receiver.
The Septentrio receiver is one of my favorite receivers, but it is not sold on online shopping sites such as Digi-Key and Mouser. I have been using the Septentrio AsteRx receiver indirectly through the RTK (realtime kinematic) commercial service ALES. When I wanted to own a Septentrio receiver someday, purchase reservations for mosaic-go CLAS receivers from CQ Publishing Co., Ltd. began, and I applied immediately.

Initially, it was announced that it would be released around March 10th, but it was actually released about a month earlier than that.
mosaic-go CLAS receiver
The receiver I purchased is capable of receiving 3 frequency bands. They are: the L1 frequency band, the L2 frequency band, and the L6 frequency band where the centimeter-level augmentation service CLAS (pronounced as Cirrus, centimeter-level augmentation service). CLAS is available only in Japan and is broadcast by the Quasi-Zenith Satellite, Michibiki. This receiver can perform high-precision positioning using CLAS by itself.
There is also a x5 type receiver that can use the L5 frequency band instead of the L6 frequency band. L5 band is widely used in GNSS. However, if you use it in Japan, I think that the CLAS type that can receive the L6 frequency band is more fun.
The Quasi~Zenith Satellite QZS-5, 6, and 7, which are scheduled to be launched from 2023 to 2024, will not broadcast positioning signals in the L2 frequency band (Reference: IS-QZSS-PNT-005, 2022-10-24, p.27, Table 3.2.1-1). Therefore, it would have been even nicer if the L5 frequency band was available instead of the L2 frequency band.
This mosaic-go CLAS evaluation kit housing is made of finely crafted metal and will satisfy to own it.

On the side, there is a USB port for powering and communication with a PC, a micro SD card slot, and two serial ports that can output timing information.

Connection with PC
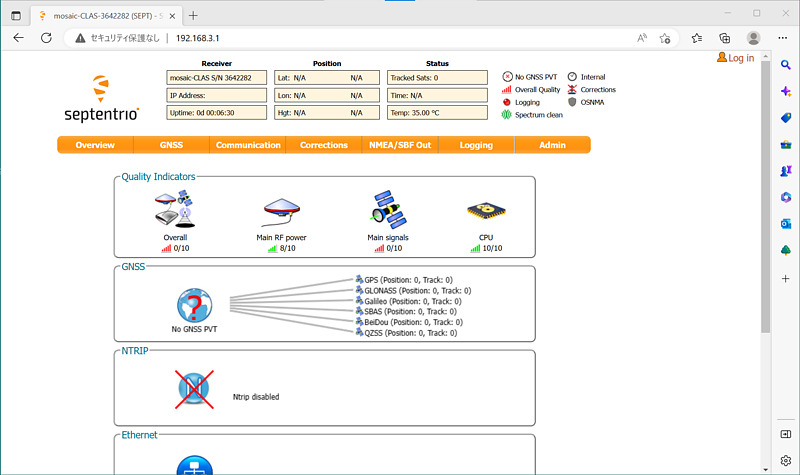
After connecting this evaluation kit to a Windows PC, a USB driver disk will appear on the PC. When I installed that driver on my PC, it assigned an IP address of 192.168.3.0/24 to my PC as a USB network adapter. If we access 192.168.3.1 with a browser on your PC, we can connect to the control screen of the receiver. The firmware version is 4.12.1, which is the latest at the moment.
On the other hand, when the receiver was connected to a Linux PC, it was assigned the same IP address as when connected to a Windows PC, without any drivers.
$ ip a show dev enx1a3202991545
4: enx1a3202991545: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UNKNOWN group default qlen 1000
link/ether 1a:32:02:99:15:45 brd ff:ff:ff:ff:ff:ff
inet 192.168.3.214/24 brd 192.168.3.255 scope global dynamic noprefixroute enx1a3202991545
valid_lft 28008sec preferred_lft 28008sec
inet6 fe80::8e69:3c74:c3b7:c0c7/64 scope link noprefixroute
valid_lft forever preferred_lft forever
I performed a port scan with nmap to this receiver, and it revealed open ports of ftp (file transfer protocol), ssh (secure shell), http (hyper text transfer protocol), and https (http secure). For some reason the DNS (domain name service) TCP port was also open. DNS often uses the UDP port, and I wonder why this receiver is opening this port.
$ nmap 192.168.3.1
Starting Nmap 7.80 ( https://nmap.org ) at 2023-02-22 17:56 JST
Nmap scan report for 192.168.3.1
Host is up (0.0064s latency).
Not shown: 995 closed ports
PORT STATE SERVICE
21/tcp open ftp
22/tcp open ssh
53/tcp open domain
80/tcp open http
443/tcp open https
Nmap done: 1 IP address (1 host up) scanned in 0.24 seconds
To use this web interface remotely, I run the following socat command on this Linux PC.
socat TCP4-LISTEN:1080,fork TCP4:192.168.3.1:80
We can access this receiver by entering http://(the IP address of the Linux PC):1080/ in the browser URI field of another PC.
GNSS signal reception
I connected the antenna to this receiver and accessed the receiver from my Mac. The operation screen is beautiful and fun.
In the GNSS -> CLAS tab, there is a setting for crustal deformation correction, and I turned it on.
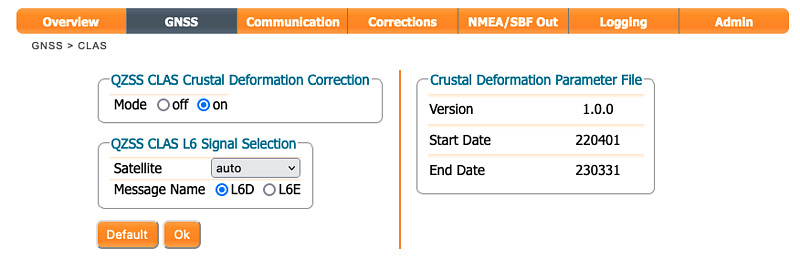
Because the Japanese continent is on four plates, it undergoes complex crustal movements. Formally, crustal deformation correction called semi-dynamic correction is performed in order to obtain map notation coordinates from satellite positioning coordinates. This receiver was installed with the latest crustal deformation parameter file from the Geospatial Information Authority of Japan. Although this receiver is a foreign product, I am grateful that the circumstances unique to Japan have been taken into consideration.
In addition, the GNSS -> OSNMA tab has settings for the OSNMA (open signal navigation message authentication) service provided by the European Galileo satellites. Currently, OSNMA authentication may fail, therefore I chose loose as the OSNMA mode here.
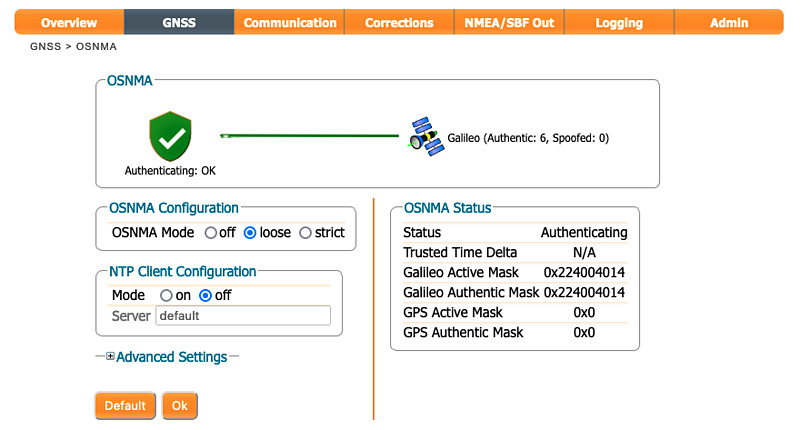
Since this navigation message authentication uses the time included in the navigation message, it is said to be vulnerable to replay attacks (recording the signal as it is and playing it back at any time). Therefore, there is an option to obtain reliable time information by NTP (network time protocol) using the Internet. However, I want to use this receiver without an internet connection, and I left this NTP setting off.
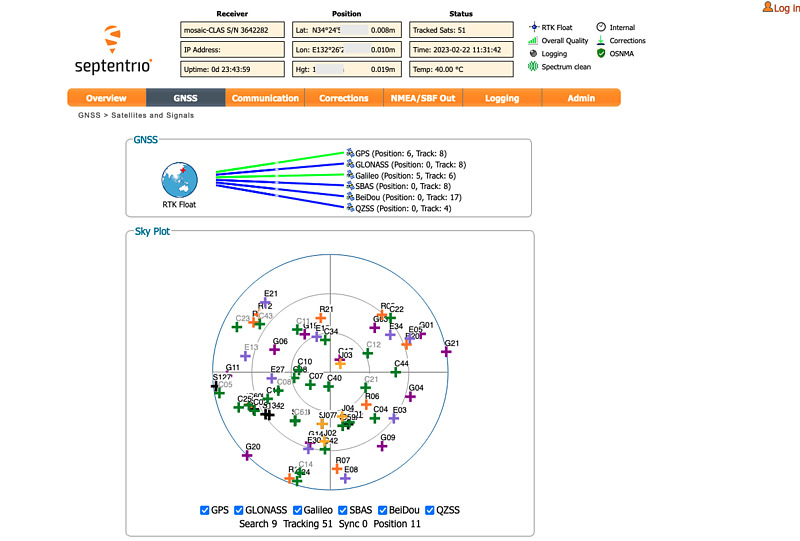
After making these settings, when I opened the GNSS -> Position tab, the Japanese geodetic system JGD2011 was displayed as the geodetic system. In addition, the RTK float solution is output as coordinates by the CLAS virtual reference station (VRS). RTK positioning with CLAS is possible without an internet connection.
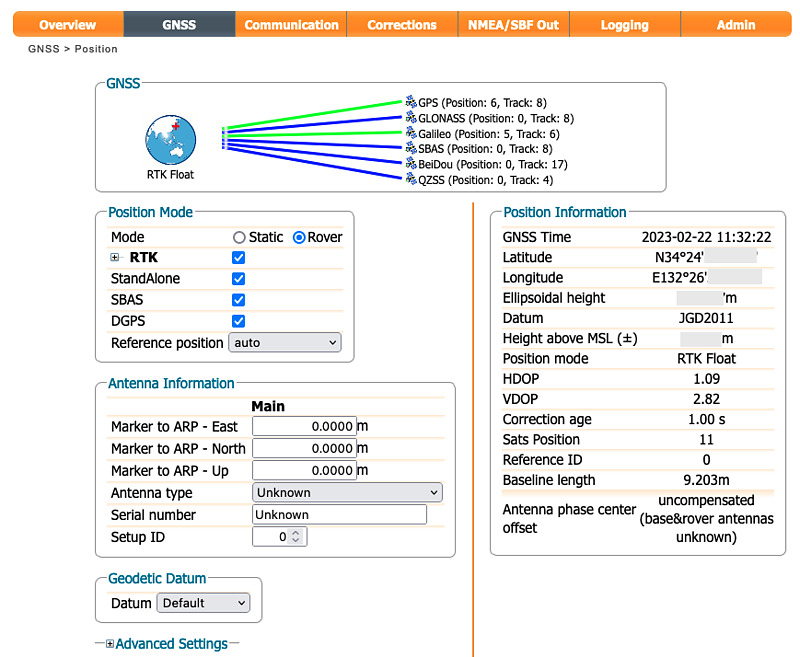
As the coordinate output here, the float solution was output, but the RTK fixed solution with higher positioning accuracy may also be output. Here, I used a BT-200 antenna installed slightly lower than the roof. It seems necessary to review the antenna and settings in order to obtain a stable fixed solution.
At the bottom of the GNSS -> Satellites and Signals tab, the Satellite Details item summarizes the azimuth, elevation, and tracking signal for each visible satellite. Focusing on J, which stands for the quasi-zenith satellites Michibiki, we can see that signal tracking in the L6 frequency band is one of the satellites that can be received.
Sat. Ch. Elev. Azim. Status
J02 22 52° ↓ 178° Tracking L1CA,L2C
J03 7 81° ↓ 35° Tracking L1CA,L2C,L6
J04 21 41° ↑ 163° Tracking L1CA,L2C
J07 23 50° ↑ 189° Tracking L1CA,L2C
If L6 signals from multiple satellites can be received simultaneously, the CLAS information can be used continuously even if one CLAS information is interrupted. It enables us to use CLAS stably even in mobile reception. I look forward to future updates to simultaneously receive CLAS signals with this receiver.
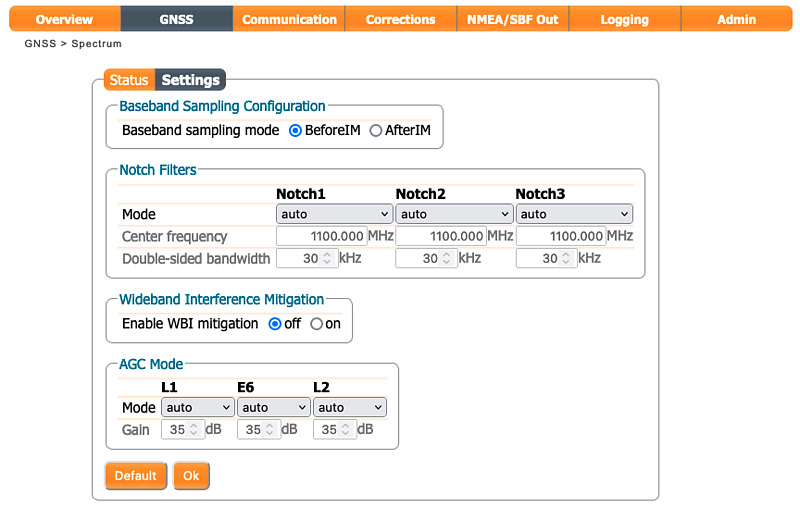
The GNSS -> Spectrum tab not only shows the signal spectrum, but also allows us to set filters and gain per frequency band.
On the NMEA/SBF Out tab, we can output positioning results, reception status, and messages broadcast by satellites.
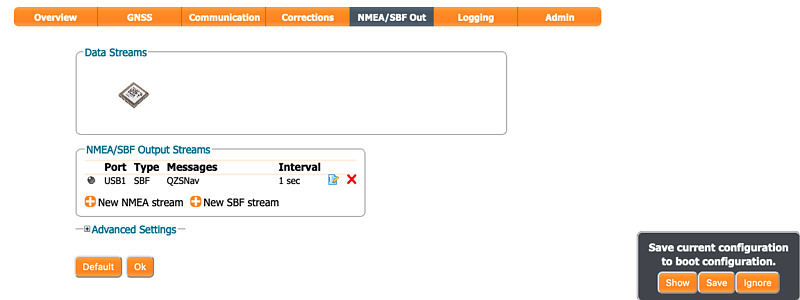
At this point, I intended to set the USB serial port to output navigation messages from the quasi-zenith satellite Michibiki, but there was no output. I might be doing something wrong, so I’ll check the manual.
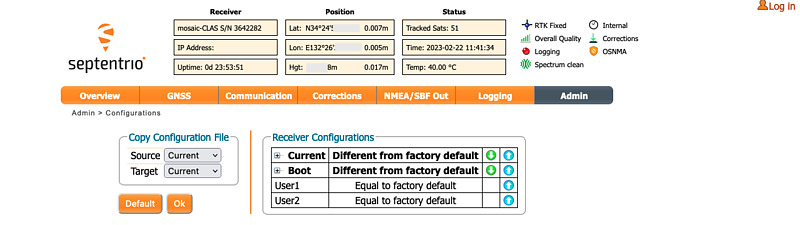
The Admin -> Configuration tab allows us to save multiple receiver settings. Not only can we easily switch between multiple settings, but it also shows what settings have been changed from the initial settings. I change the settings of the GNSS receiver too much and get confused, and sometimes I have to restore the factory settings and set them from the beginning. Therefore, it is nice to see the changes from the initial values.
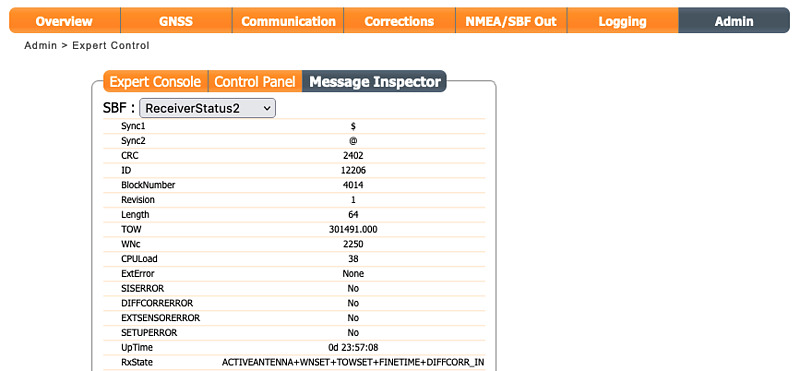
The information on the Admin -> Expert Control tab is interesting. SBF:ReceiverStatus2 of Message Inspector shows the operating status of the receiver.
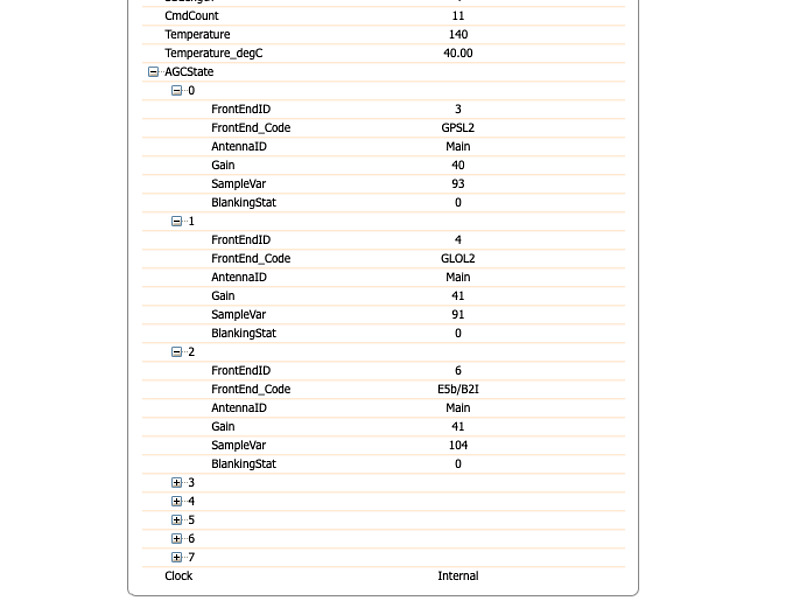
Below that, the state of automatic gain control, AGC State, is displayed. From this indication, this receiver has 8 baseband receivers, in order GPS L2, GLONASS L2, Galileo E5b and BeiDou B2I, Michibiki L6 (although labeled as Galileo E6), BeiDou B3I, GPS L1 and Galileo E1. , GLONASS L1, and BeiDou B1I. It is interesting to group multiple GNSS signals of interest into one or two groups and assign baseband receivers to each.
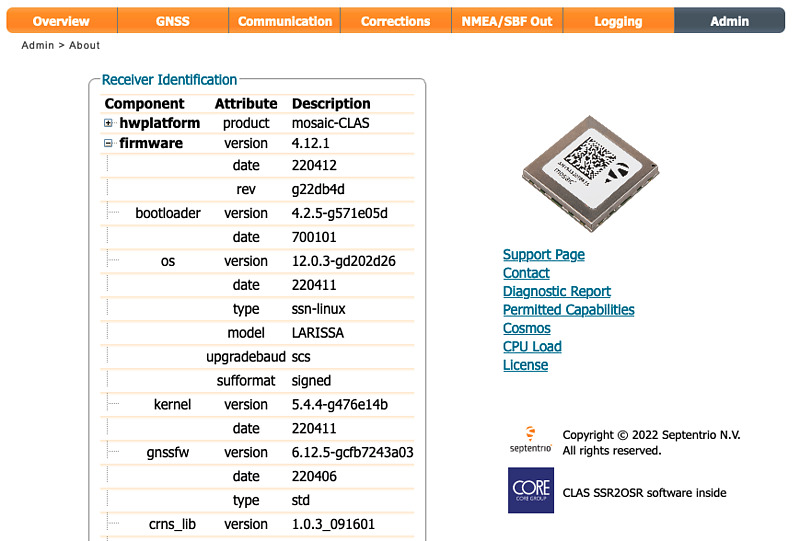
In the Admin -> About tab, in addition to the version display, an acknowledgment to Core Co., Ltd. and a description of CLAS SSR2OSR (conversion from state space representation to observation space representation). I think it is not SSR2OSR but is SSR2OBS, because the receiver realizes VRS with CLAS. A word Linux was displayed in the OS column.
Clicking on the Permitted Capabilities link, I found that many capabilities were allowed.
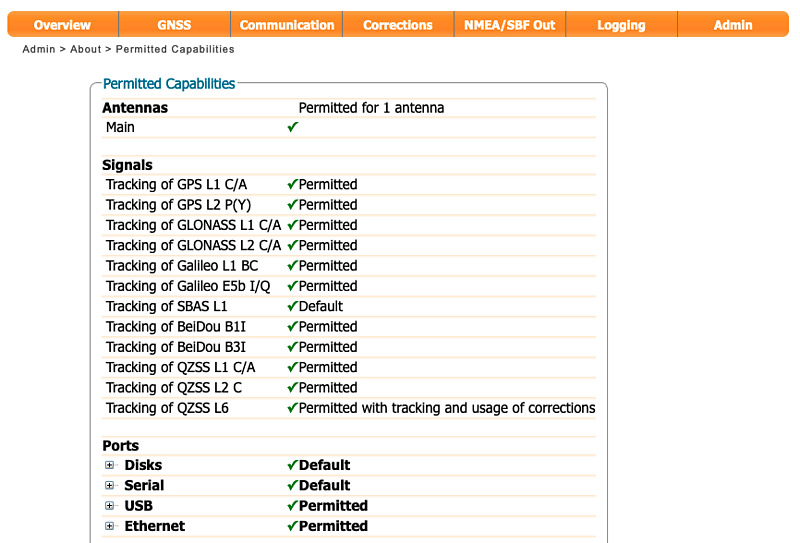
The only things not allowed here were precise timing and frequency outputs. Clicking on the Diagnostic Report link in this Admin -> About tab will display a detailed report in XML format. When I downloaded this XML file, it also described disallowed features not shown here, such as L5 frequency band reception.
I will utilize this receiver for raw data output and movement measurement.
Conclusion
I introduced the Septentrio mosaic-go CLAS receiver. This receiver has a beautiful housing and an easy-to-use web interface, and can be remotely connected via TCP/IP from outside by connecting a Linux microcomputer. This receiver can use high-precision positioning CLAS for Japan, and can also use Galileo’s navigation message authentication, so it is especially fun to use in Japan. This receiver has many functions, so I would like to try them little by little.