電動クローラの組み立て(その4)
はじめに
電動クローラ(運搬車)を組み立てています。これまでの作業で組み立てはできたのですが、動作させるまでに試行錯誤が必要でした。一応は自動運転ができるようになりました。
最小構成での自動運転
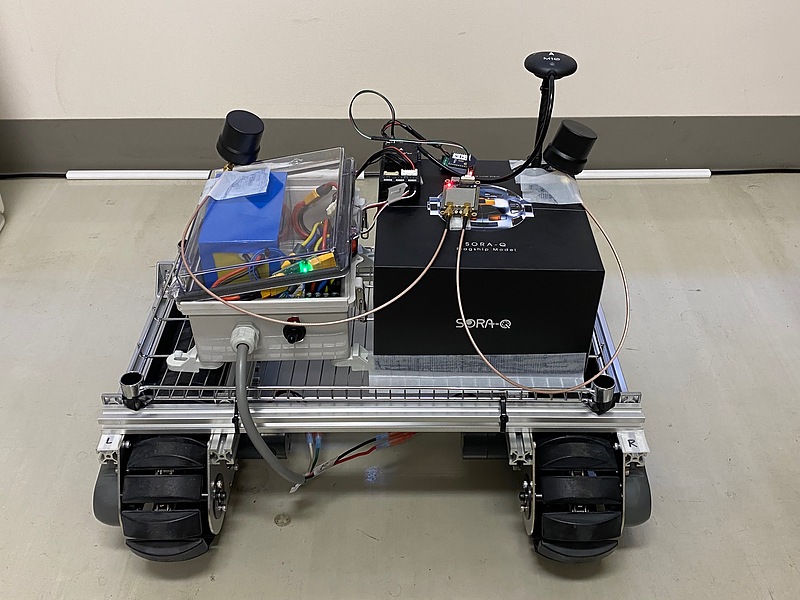
クローラ本体は、モータや電池などが一体になっているCuGo V3、自動制御マイコンPixhawk 6X、GPSアンテナからなります。
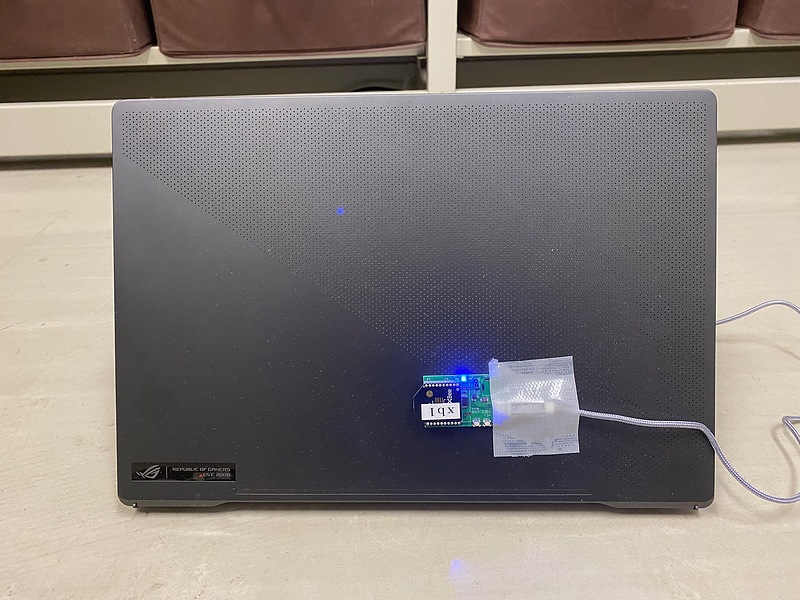
また、走行コース設定、走行指示、センサ状態監視のために、Mission Plannerをインストールしたパソコンも必要です。クローラ本体とノートパソコンのそれぞれをZigBee無線にてシリアルポート接続しています。ノートパソコンを抱えながらクローラを追いかけることになるので、ノートパソコン裏側にZigBeeモジュールを貼り付け、無線モジュールが邪魔にならないようにしました。
初期検討として、テープで機材を固定しながら機材配置を決めます。
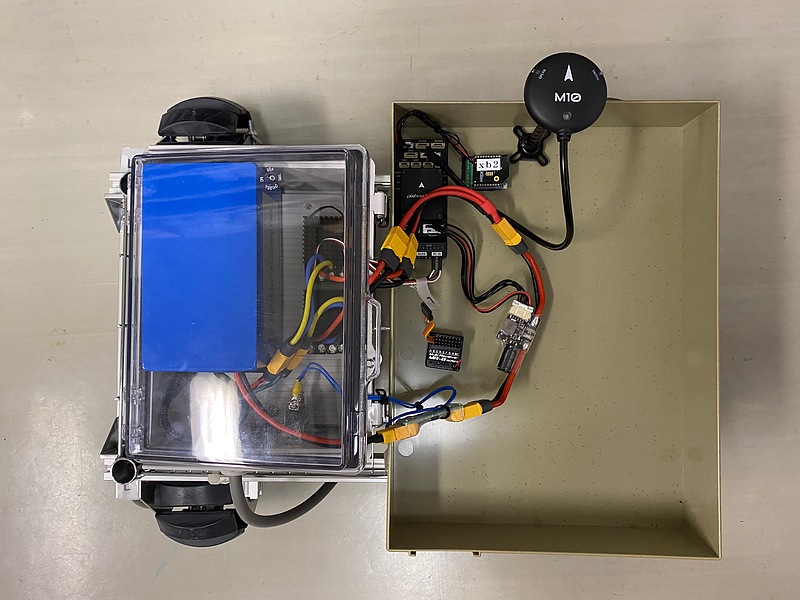
クローラのマイコンは、GPS受信機やマイコン内部の慣性航法センサで自らの進むべき方向を決定します。走行前に慣性航法センサ(IMU: Inertial Measurement Unit)の較正が必要です。この較正は、IMU自体をランダムに大きく回転させることにより行いますので、しっかりとマイコンを固定してしまうと後に苦労します。このGPS受信機(M10と書かれています)にもIMUが内蔵されていますので、IMU較正時にはこのGPS受信機もランダムに大きく回転させます。
IMU較正後、クローラにマイコンを取り付けましたが、Mission Planner上に過大な磁界を示すエラーが表示され、運転モード(arm)にできませんでした。クローラ本体が磁化されているようです。マイコンを金属部分から離すために、マイコンをダンボール箱でかさあげしました。それでも、マイコン内IMUと、GPS受信機内IMUとのデータ矛盾を示すエラーは解決できませんでした。
クローラを外に持ち出して動作確認しました。クローラが静止状態であっても、測位精度不足のために、パソコン上では動いているように表示されます。自動運転させてもランダム方向に動き出して、電源オフによる動作停止が必要でした。
RTKと2アンテナGPS受信機を用いた自動運転
そこで、Pixhawk 6XマイコンのGPS2ポートに、2アンテナにて方位計測できるGPS受信機Unicore CommunicationsのUM982を接続します。これらもテープで仮止めしています。この2アンテナ受信機は、連続した測位でアンテナ間の位置関係を推定し、静止時でもクローラ方位を推定できます。RTCM形式によるRTK測位も可能です。Mission Planner上で、IMUによる方位推定をオフにし、GPS受信機による方位推定をオンにしました。
パソコンには無線ゲームパッドも接続します。Mission Plannerでは、ゲームパッドによるマニュアル操縦も可能です。これでクローラの移動が楽になりました。結局、ノートパソコンとゲームパッドの両方を抱えて、電動クローラを追いかけながら実験することになります。なお、Bluetooth接続タイプのゲームパッドは、Mission Plannerでは利用できないので、注意が必要です。
単独測位では精度不足ですので、測位にローカルRTKを用います。RTKの基準局情報はMission Planner上で設定し、補強情報もMission Plannerを動作させるパソコン上で受信します。RTK利用のために、スマートフォンによるテザリングも必要です。
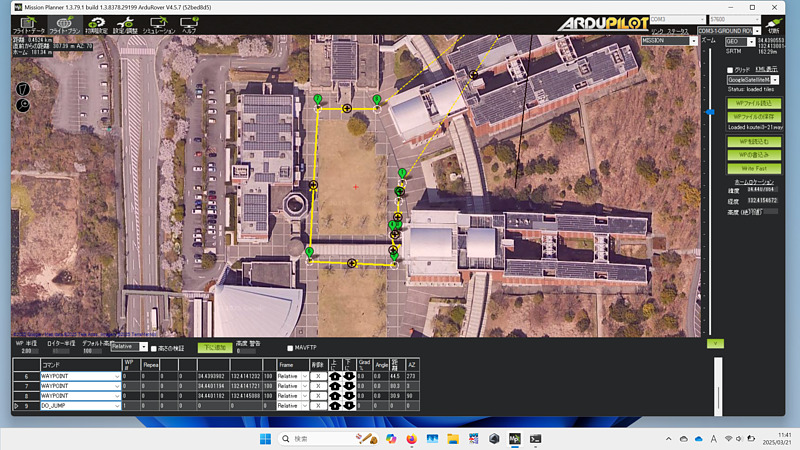
屋外で測位しながら、クローラ本体を移動させ、任意地点にて、Mission Planner上でウェイポイント(走行経由地点)を設定します。その後、Mission Plannerからクローラマイコンにウェイポイントを転送し、自動走行の指示を出します。
実は、走行経路の一部が道路の端にあり、危うく地上構造物に接触しそうになりました。その度に本体電源を切断して停止させるので、コース周遊に時間がかかりました。あらかじめウェイポイントを設定しておき、現地ではその確認にとどめるべきでした。接触停止センサや、リモート停止手段も必要でした。
おわりに
クローラ自動走行には、測位精度だけでなく、方位推定も必要です。RTKや2アンテナ受信機を利用して、なんとか自動走行ができました。ゲームパッドによる手動操縦も実験効率化に役立ちました。IMU利用は諦めました。接触時の停止やリモートでの停止、また、電源や防水方法を検討して、更なるクローラの改良をしてみたいと思います。
関連記事
- 電動クローラの組み立て(その3) 21st October 2024
- 電動クローラの組み立て(その2) 15th October 2024
- 電動クローラの組み立て(その1) 11st October 2024