Livox Horizon LiDARによる3次元空間測定
はじめに
LiDAR(Light Detection and Ranging、ライダーと読みます)とは、レーダ(Radio Detection and Ranging、電波探知測距)の電波の代わりにレーザ光を使うものです。レーダと同様に、LiDARは、対象物体に特段の機器を備えることなく、物体の存在やその物体までの距離を測定できるものです。レーザ光の照射方向を上下左右に走査することにより、自らを中心とした周囲物体の存在やそれまでの距離を測定できます。
実はLiDARは身近にあります。スマートフォンの顔認証では、所有者の写真で勝手にロックを解除されたら困りますので、その顔の奥行きも認証に用います。物体の奥行をも測定できるLiDARは一般的になりつつあります。

Livox Horizonの設定
今回使用したものは、LivoxのHorizonです。このLiDARの走査角(FOV: field of view)は、水平方向で81.7度、垂直方向で25.1度であり、最大探知距離は260 mです。この製品は、走査に微細機械(MEMS: micro electro mechanical system)を使い、1秒間に最大24万点の空間座標を測定できます。また、このLiDARは、波長905 nmのClass 1アイセーフレーザを用いています。
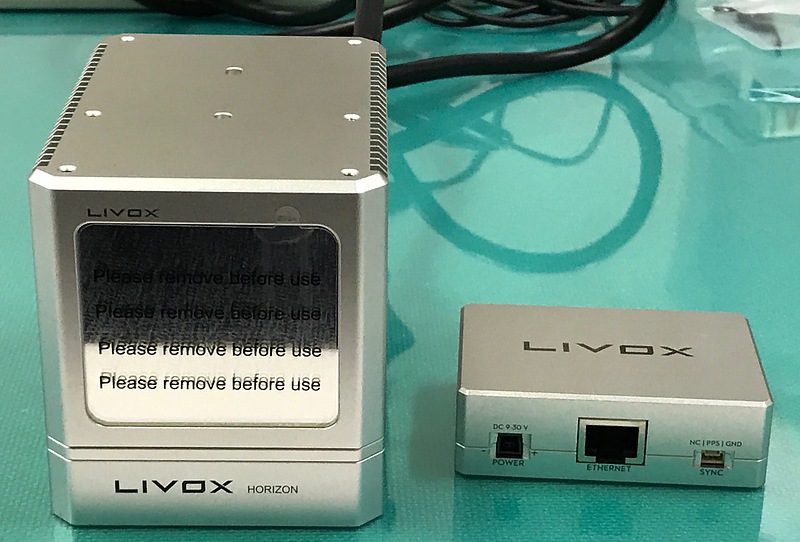
このLiDAR本体(写真左側)の重量は、1 kgを超えます。マグネットルーフ基台にこのLiDARを取り付け、私の自家用車の天井にのせてみましたが、やはり重たくてぐらつきがありました。正面の保護シールをはがすと、鏡面が現れます。LiDAR本体は、写真右側の「コンバータ」と組み合わせて用います。このコンバータとパソコンとは、イーサネットにて接続します。そのIPアドレスは、初期値として192.168.1.60が設定されていますが、後にDHCP自動取得にも変更可能です。このコンバータに供給する電源電圧は、9ボルトから30ボルトの範囲です。このコンバータに実験用電源から10ボルトを供給したところ、定常動作時では1.1アンペアの電流が流れました。低温の時にはヒータが動作するため、そのQuick Start Guideでは、30ワット電源が推奨されています。
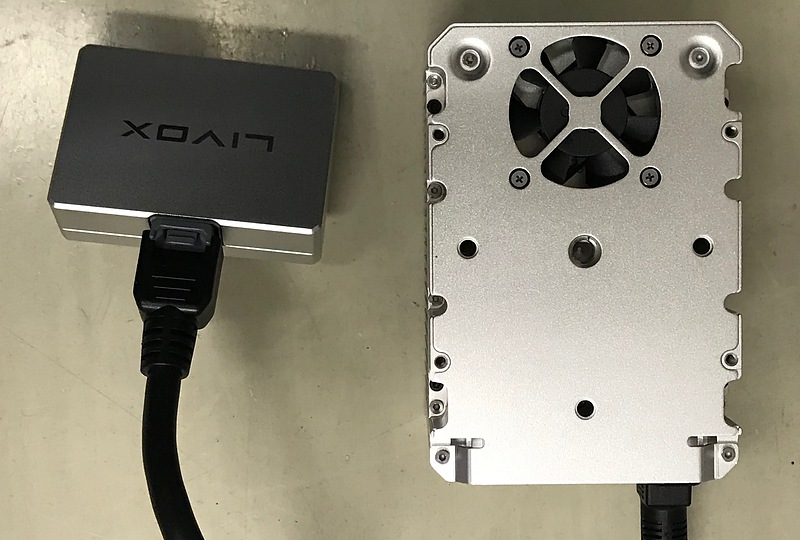
そのLiDAR本体の背面には排熱ファンがあります。このファンを外すこともできますが、Quick Start Guideによると、このファンは頻繁に着脱する物ではないとのことでした。
イーサネット経由で自らのプログラムからこのLiDARを利用するためのSDK(software development kit)も公開されていています。ここでは専用のビューワLivox Viewerを利用しました。このソフトウェアは、Windows 10 64 bitまたはUbuntu 16.04で動作します。
はじめに、私がいつも利用しているMac Pro Late 2013上にUbuntu 16.04のVM(virtual machine)を構築しました。Livox Viewerを起動すると
./livox_viewer.sh: line 11: 2060 Illegal instruction (core dumped) ./so/livox_viewer
なるエラーが出て起動できませんでした。Livox Viewerは、CPUにマルチメディア機能「AVX2」を求めるのですが、この古いPCのCPU(Intel Xeon E5-1680v2)にはそのAVX2が搭載されていないためです。VMはCPU機能のエミュレーションまではしないのです。最近導入したノートPC(CPUはIntel Core i5-7Y57)のVM上では動作しましたので、こちらを使いました。
まず、Livox Viewerを用いて、ファームウェアをアップグレードしてから、LiDARを動作させます。Livox Viewer上でLiDARのIPアドレス割り当てを変更したり、LiDARとの双方向通信を行うため、VM上のネットワークはブリッジモードにする必要があります。
実験
このコロナウィルス感染症警戒の中、その屋外実験は困難なので、職場の窓から実験しました。

LiDAR起動中は、「ブーン」というやや大きな音がします。
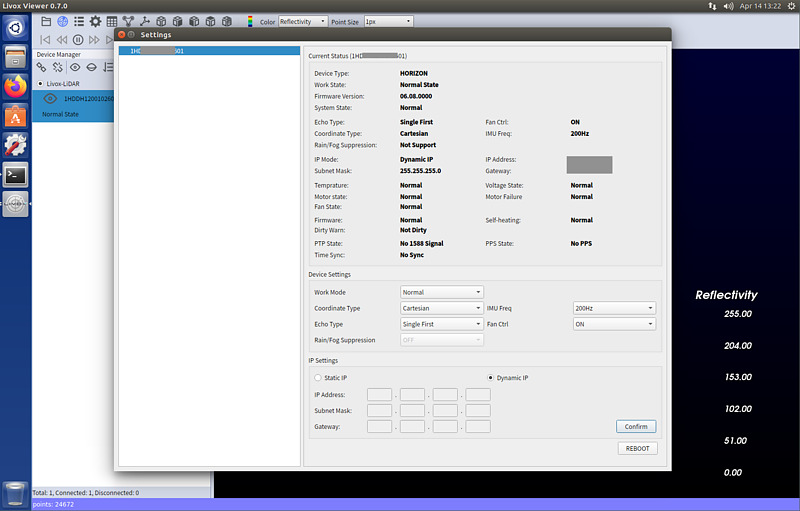
コントロール画面では、「Dirty Warn」の項目があり、LiDAR走査角内に窓の縁が当たると、この警告が現れました。視界を確保して、LiDAR観測を行います。
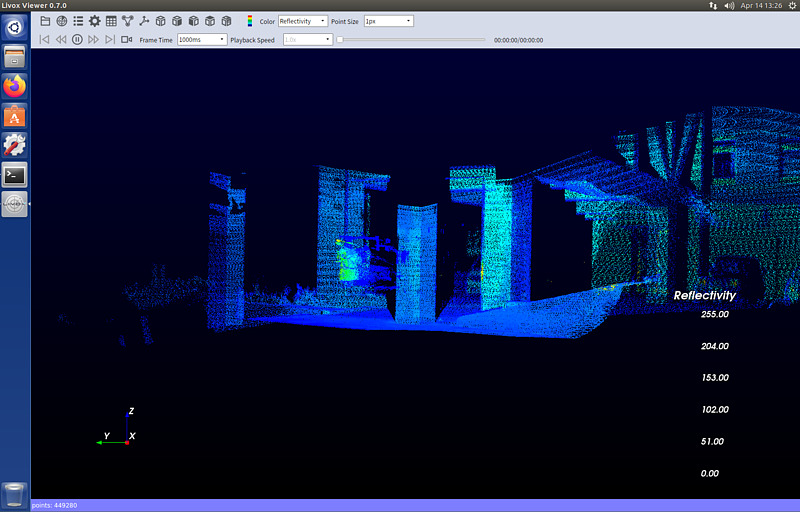
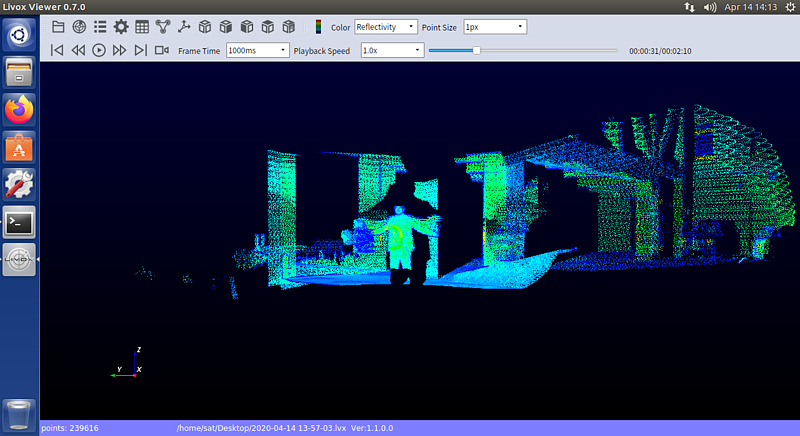
中央のやや左側に人のようなものが写っていますが、これは大学内の車両進入禁止の看板です。次に私が研究室の外に出て、LiDARの前に立ってみました。レーザで物体を測定しているため、私の背後には大きな影ができています。このLiDARの分解能は2 cmですので、私のお腹の出っ張り具合も測定できているはずです。
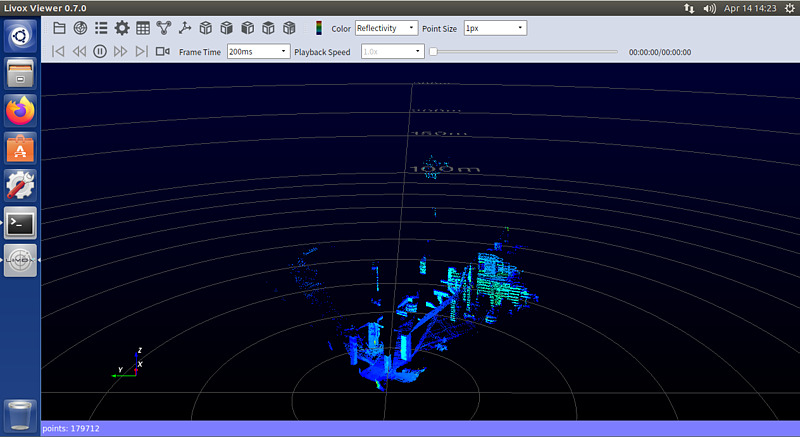
最後に表示モードを変えたら、鳥瞰図が表示できました。確かに、空間の相対座標値を測定し、任意視点でのレンダリングを行えば、鳥の目から見た景色が再現できることは明らかかもしれませんが、実際にそのリアルタイム映像を見たら感動します。
また、IMU(慣性計測ユニット:inertial measurement unit、ジャイロ、磁界センサなど)もついていて、200 Hzのレートで測定できているようが、そのデータの確認方法はわかりませんでした。
自動車のルーフにGNSSアンテナとこのLiDARをつけて、大学周辺を走行してみたいです。はやく世の中が平和になることを祈っています。