Septentrio mosaic-go CLAS new firmware 4.14.0
Mosaic-CLAS version firmware version 4.14.0 has been discontinued. Please use 4.12.1. 4.14.0 is available for mosaic-X5. Removed link about firmware download from article. (Updated 2023-07-09)
Introduction
A new firmware for the mosaic-go CLAS GNSS receiver made by Septentrio in Belgium has been released, so I applied it to my receiver.
This receiver can process the high-precision augmentation information CLAS broadcast by the Quasi-Zenith Satellite, Michibiki, and can output coordinates consistent with Japanese map coordinates using the Geospatial Information Authority of Japan’s crustal deformation correction parameters. Starting with this firmware version 4.14.0, this parameter file can be updated without a firmware update.
In addition, it has been announced that L1 C/A, one of Michibiki’s positioning signals, will be changed to L1 C/B in the future, and the new firmware will make it possible to interpret this L1 C/B signal as well.
Release notes
The changes from the previous version 4.1.2 to this version 4.14.0 are as follows:
New features in version 4.14.0
- Added support for RTCMv3 MT1013 to reduce Time To First Fix.
- GNSS signal delays can now be compensated through the new setCalibCommonDelay and setCalibSIgnalDelay commands.
- Support for the tracking of the future QZSS L1 C/B signal has been added.
- Support of PTP protocol has been added.
- The RTK base type (physical, VRS or PPP-RTK) can now be retrieved from the WACorrInfo field of the SBF messages PVTGeodetic and PVTCartesian.
- The crustal deformation file can now be upgraded independently from the firmware updates.
- An IOD holdoff can now be defined for RTCMv2 corrections.
Improvements in version 4.14.0
- OSNMA has been partially adapted to SIS ICD v1.0.
- Compatibility with Let’s Encrypt TLS certificates has been improved.
- The default setting for the CLAS CrustalDeformation command has been changed to “on”.
- Spoofing detector has been improved.
- When configuring the receiver to broadcast or multicast data (e.g. SBF, NMEA) over UDP, on the “Ethernet over USB” network interface, the data was transmitted twice. This bug is resolved.
- Added support for the BeiDou B2I signal.
- Compatibility with missing RTK GPS L2P(Y) corrections has been improved.
- Added T-RAIM to increase robustness for timing applications based on prescribed coordinates Rare loss of L5/E5 band signals has been addressed.
- The used time system is now shown on the Web Interface’s GNSS/Position page.
- Improved KSZ8081 support in Ethernet PHY detection.
- An issue affecting the logging of GPS and GLONASS RINEX v2.11 navigation files has been solved.
- The probability of occurrence of cycle slips under heavy vibrations or shocks is decreased.
- A better traceability for the antenna information has been implemented.
- A new “IgnoreHealth” option has been added to the setL6CLASSource user command, to support early QZSS L6 experimentations where the Alert/Health flag is raised in the L6 message.
- Proper support of eMMC memories with replay protect memory block (RPMB) connected to the SDIO logging interface.
- The GPSCNav SBF block has been added, containing CNAV data from GPS L2C and L5.
- In a signal simulation scenario using only L1 and L2P GPS and GLONASS legacy signals, time must start after Dec 31, 2019 (instead of Dec 31, 2015 in previous releases).
Firmware update
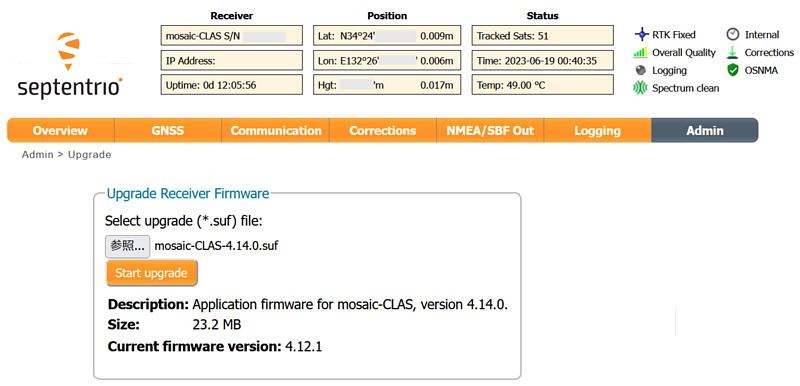
Download the ZIP file from the Septentrio support page. The file name is mosaic-CLAS_fwp_4.14.0.zip (file size is 41.4 MB).
Unzip this ZIP file, select Admin->Upgrade on the web management screen, and upload mosaic-CLAS-4.14.0.suf.
I always get nervous when updating firmware.
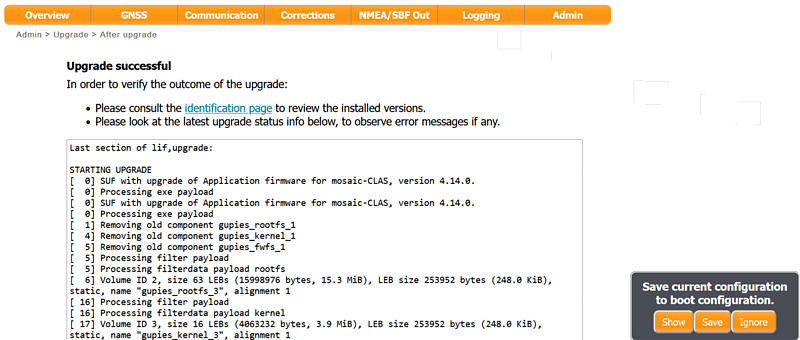
Along with the message that the firmware update was successful, a pop-up window appeared asking whether to reflect the configuration file update. I pressed the Show button to check the changes, but it seems that there was no change in the configuration file.
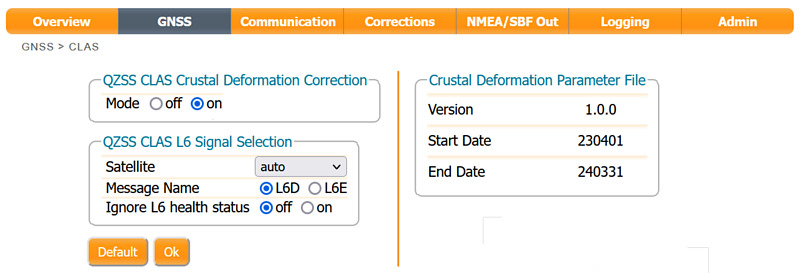
With the new firmware, even if the alert flag on the L6D signal that transmits Michibiki’s CLAS augmentation information is on, it is now possible to use that augmentation information forcibly. Also, the date of crustal deformation correction has been updated to the latest one.
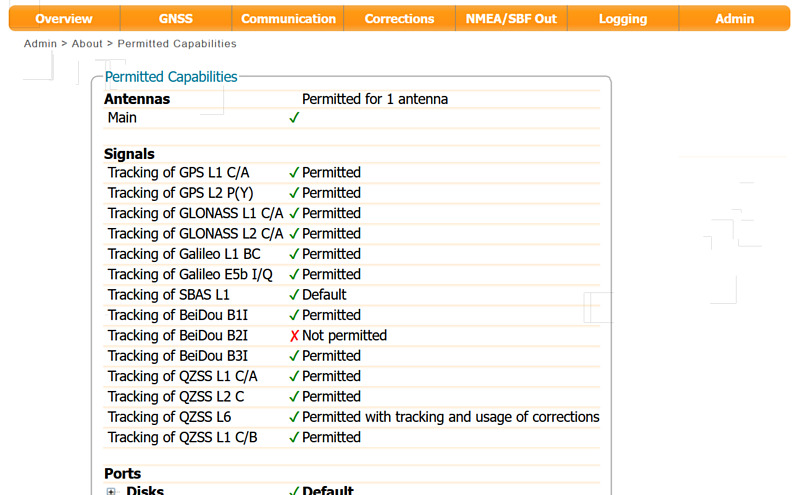
I looked at Admin->About->Permitted Capabilities in the web admin screen. Michibiki’s L1 C/B is now available. On the other hand, although the BeiDou B2I item was added, it is marked as unavailable. Besides that, Time Sync and Frequency Sync were marked as unavailable.
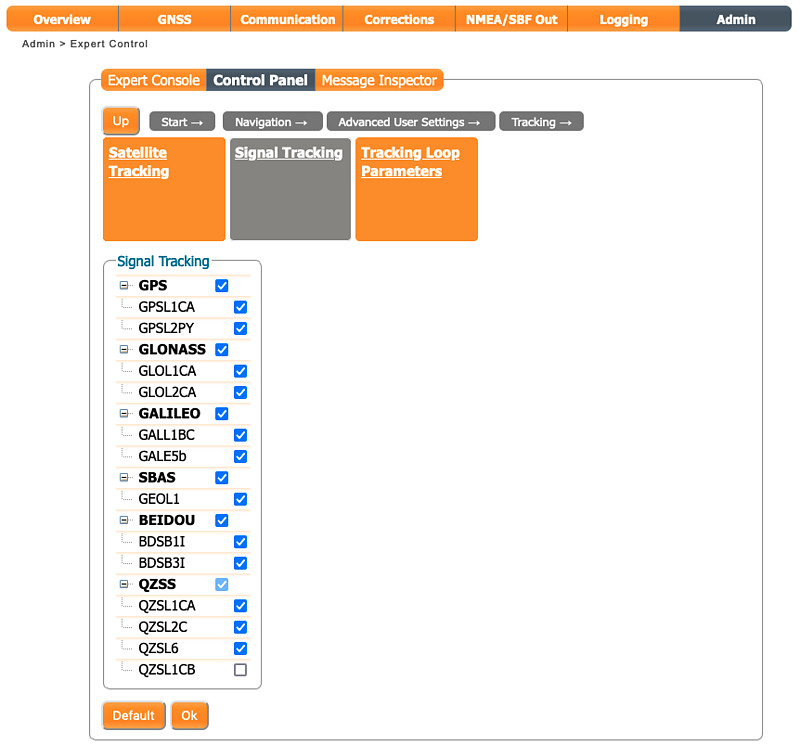
I checked Admin->Expert Control->Advanced User Settings->Tracking->Signal Tracking. If Michibiki’s L1 C/A signal shifts to L1 C/B signal, this should be changed.
This mosaic-CLAS is wonderful because it can perform RTK (realtime kinematic) positioning by VRS (virtual reference station) of CLAS by itself, but [mosaic-X5 owned by Professor Takasu](https://gpspp.sakura .ne.jp/diary202306.htm#0616), the number of signals is less. The mosaic-X5 is also great, as it can now also receive Galileo E6 and BeiDou B2b signals.
Secure shell function
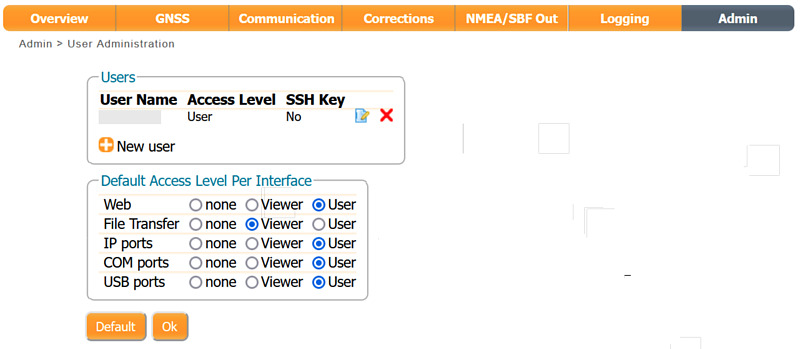
Although it is a function from before, I turned on the secure shell function. On the web management screen, select New user from Admin->User Administration and register a login user.
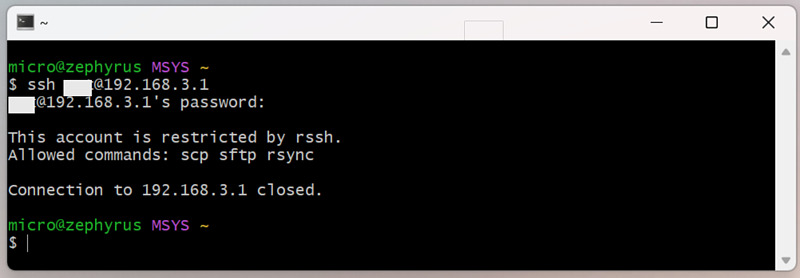
Then, from the console of the personal computer, I tried to log in with the registered user using ssh. However, I couldn’t use the expected interactive shell, and only transferred files using scp, sftp, and rsync.
Use of TCP/IP port
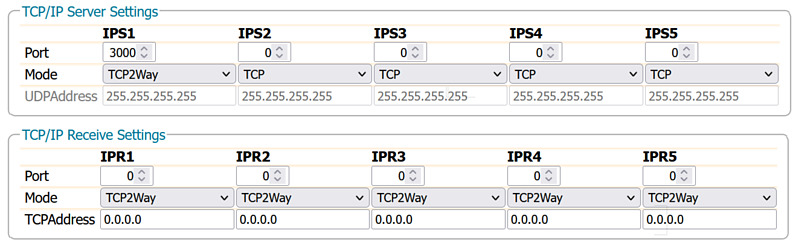
So I tried the (long…) TCP/IP Server Settings in Admin->Expert Control->Control Panel->Communication->Network Settings->General. The default port number is zero. For example, set port number 3000 to IPS1, mode TCP2Way, and press the OK button.
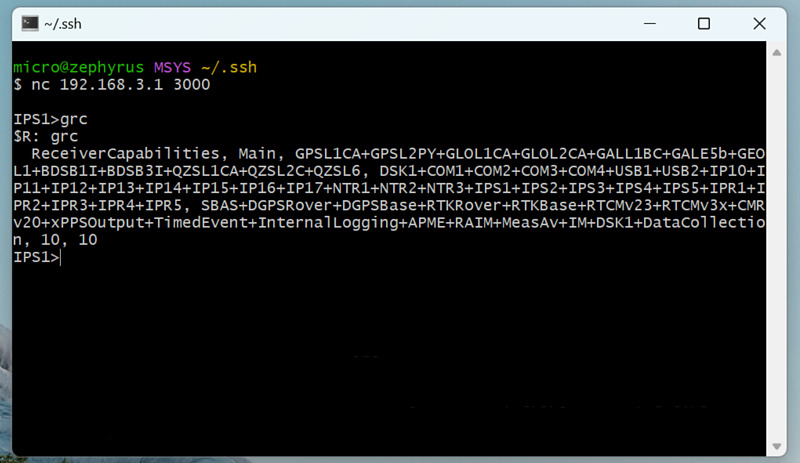
This setting made it possible to send text-based commands to this receiver (later, even if you connect to the port number 28784 written in Commands Port in Communication->IP Ports, the same I realized I could…).
In addition, for example, set port number 3001 and mode TCP to IPS2, select NMEA/SBF Out->New SBF Stream->IP Server->IPS2 on the web management screen, Select On Change (output data as soon as it appears) for Interval, select RawNavBits->QZSRawL6 for content, and press the OK button. A message that seems to be raw data is output to port 3001.
It seems that Michibiki’s CLAS augmentation information can be output externally, so I’m thinking of making a converter from Septentrio format to L6 format.
It seems that there are various other functions, so I will explore it.