First trial of CLAS positioning of QZSS
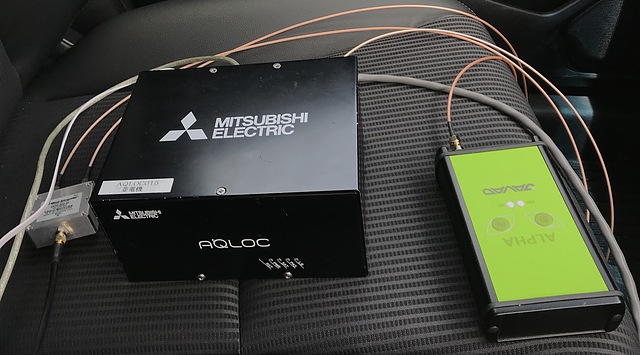
The CLAS (centimeter level augmentation system) signal is a signal broadcast by the Japanese Quasi-Zenith Satellite 3 (geostationary satellite), and is an augmentation signal that improves the accuracy of positioning results from GPS and quasi-zenith satellites. I borrowed AQLOC-V, a device that can receive this signal directly and output a real-time position for a week.

The positioning result can be obtained from back of AQLOC-V serial port (Dsub-9pin). We also obtain it from USB-B port with a configuration. If we use Macintosh note, connecting cable and type
screen /dev/tty.usbserial-1440 115200
to obtain the positioning results on the screen in the NMEA 0183 format. In screen command, type ctrl-a (press a key with control key, and type H (capital letter) to capture the screen log as a file namescreenlog.0. Press ctrl-a and H to stop the capture. For terminating screen command, press ctrl-a and q.
The measurement output can be directed from RS-232-C port to USB-B port by connecting Ethernet. Plug LAN connector and connect IP address 172.16.40.1,
telnet 172.16.40.248 8000 (IP address and port are fixed)
to see prompt. According to the manual book, type
nmeaport usb
config write
to direct the measurement output to USB-B port. Other configuration are left as:
Positioning: Kinematic (High speed)
Antenna: JAVRINGANT-G5T
Observation cycle: 10 Hz
Satellite number L6 delivery: auto
NMEA output: USB
Network number: auto
Filter reset: off
I connected Javad GrANT-G5T and 5/8 inch mount to fix the car roof.

For comparison of the positioning results, Javad GrANT-G5T antenna output was fed to a signal splitter of Mini Circuit, and was provided to this AQLOC-V and the Javad Alpha G3T receiver.
I connected Macintosh notebook placed back seat of a car to USB and Ethernet cables.
In a stationary, we can see $GPGGA of NMEA message and its seventh decimal place of latitude was almost unchanged. It can be said that the position is determined in centimeter order.
I drove the same route in one lane of the university campus for 5 laps and recorded the positioning results. If the positioning result tracks overlap, it is considered that the positioning accuracy is about 10 cm. The result was wonderful. A part of the path passes through the trees, but due to the south side being shielded, a misalignment occurred once and a large trajectory displacement appeared.
RTKLIB’s RTKPLOT can be conveniently used for plotting NMEA file. Comparison with single-frequency RTK, comparison with MADOCA via Internet distribution, and comparison with RTK using the Geographical Survey Institute’s electronic reference point results were made.
I am grateful for the valuable experience. I hope someday the results will be published.