Three dimensional spatial range measurement with Livox Horizon LiDAR
Introduction
LiDAR (Light Detection and Ranging) uses laser light instead of radio waves from radar (Radio Detection and Ranging). Similar to radar, LiDAR can measure the existence of an object and the distance to that object. By scanning the laser beam irradiation direction up, down, left, and right, we can measure the presence of surrounding objects centering on you and the distance to that point.

Setting up Livox Horizon
The one I used this time is a product called Livox Horizon. It has a scan angle (FOV: field of view) of 81.7 degrees in the horizontal direction and 25.1 degrees in the vertical direction, and the maximum detection distance is 260 m. It uses a MEMS (micro electro mechanical system) for scanning and can measure up to 240,000 points a second for space. Also, the LiDAR uses a Class 1 eye-safe laser with a wavelength of 905 nm.
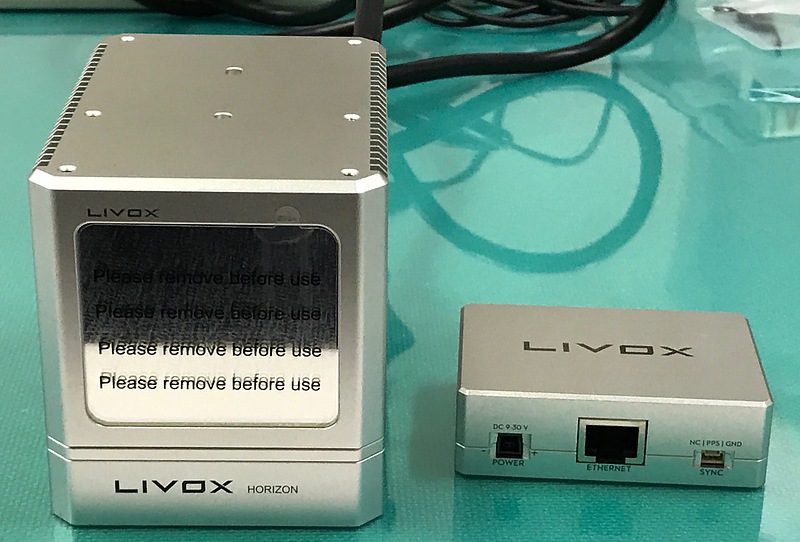
The LiDAR body (the left side of the photo) weighs over 1 kg. It is a little uneasy to use the roof base to mount it on a recent automobile with a thin ceiling. Peeling off the protective seal on the front and we can see the mirror surface. We use this LiDAR body with the “converter” on the right side of the photo. We connect this LiDAR to a personal computer via Ethernet. The initial value of the IP address was 192.168.1.60, but it is also possible to set up DHCP in the later setting. The power supply voltage to the converter is in the range of 9 to 30 volts. When 10 V was supplied to this converter, it consumed 1.1 amp during steady operation. A 30 watt power supply is recommended by the Quick Start Guide because the heater would activate when it operate at low temperatures.
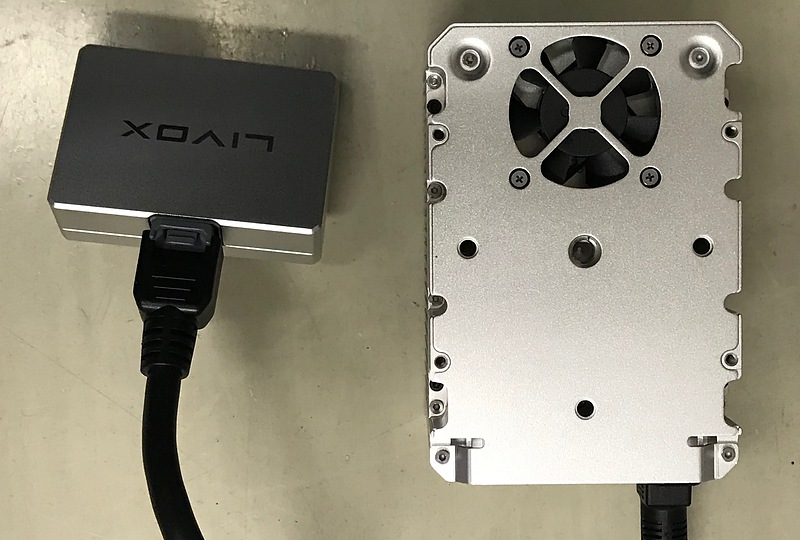
There is a heat exhaust fan on the back of the LiDAR body. Though we can remove this fan, it is not recommended to install and remove the fan frequently.
An SDK (software development kit) for using this LiDAR from your own program via Ethernet is also disclosed. I used the dedicated viewer, Livox Viewer here. This software runs on Windows 10 64 bit or Ubuntu 16.04.
First, I tried, in vain, to use Livox Viewer with a VM (virtual machine) of Ubuntu 16.04 on the old Mac Pro that I always use. When I started Livox Viewer, I got an error,
./livox_viewer.sh: line 11: 2060 Illegal instruction (core dumped) ./so/livox_viewer
and could not start it. This is because the software requires the CPU to execute the multimedia function “AVX2” and the VM does not emulate the CPU function. Livox Viewer worked on another new laptop VM.
First, I used Livox Viewer to upgrade the firmware before operating LiDAR. The network on the VM must be in bridge mode in order to change the IP address allocation of LiDAR on Livox Viewer and to perform bidirectional communication with LiDAR.
Experiments
It’s difficult to experiment outside this coronavirus infection alert, so I experimented from the window of the workplace.

While LiDAR is running, there is a slightly loud noise.
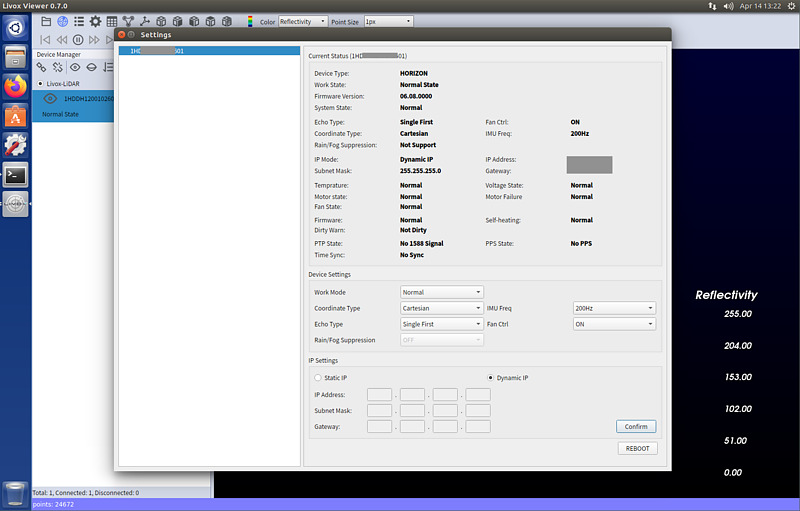
On the control screen, there is a “Dirty Warn” and this warning appears when the edge of the window hits within the LiDAR scan angle. It also has an IMU (inertial measurement unit, gyro, magnetic field sensor, etc.) and can measure at a rate of 200 Hz.
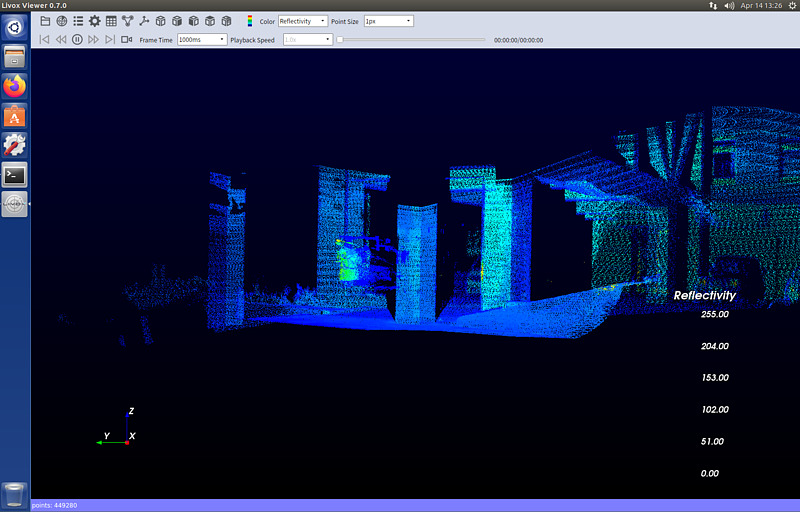
There is something like a person on the left side of the center, but this is a sign that prohibits vehicles from entering the university. Next I went out of the lab and stood in front of LiDAR.
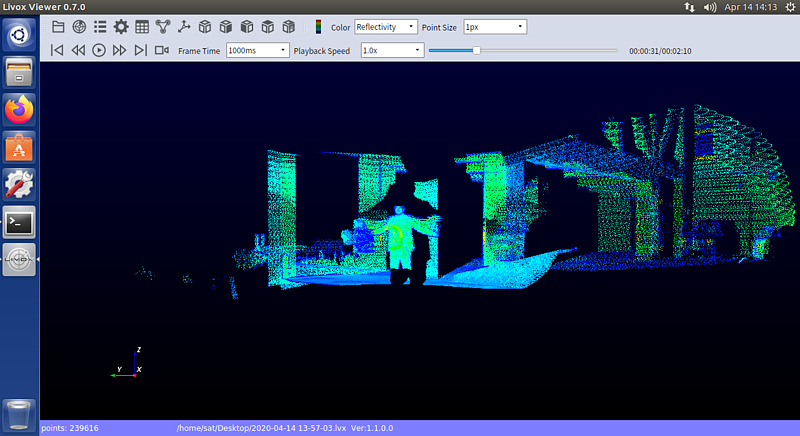
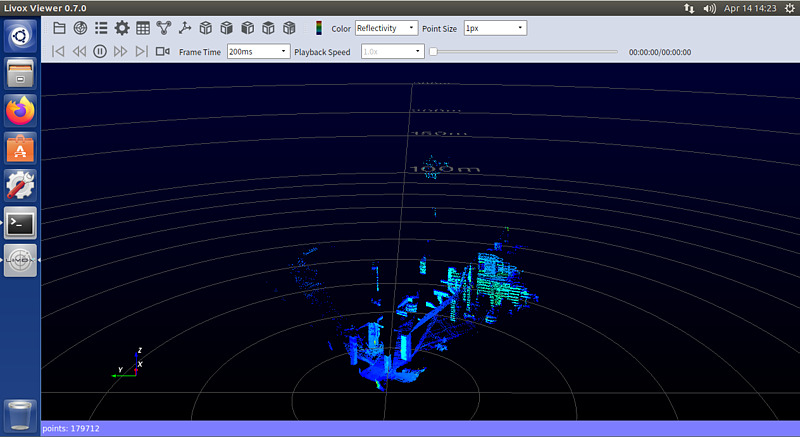
There is a large shadow behind me because I am measuring the object with a laser. I changed the display mode, I could display the bird’s-eye view.
I would like to drive around the university by attaching the GNSS antenna and this LiDAR to the roof of the car. I pray that the world will be peaceful soon.